

A valóságos szabályozási hurkok viselkedése mindig eltér az elméleti viselkedéstől. A szabályozó nem a valódi visszacsatolást kapja, az algoritmus a kvantálás miatt keletkező zajt beleszámítja a kimeneti jelbe, stb. Ezekhez az ismert és tűrhető értéken tartható hibákhoz hozzáadódik a beavatkozó szerv tökéletlensége. A leggyakrabban használt beavatkozók közül a motoros szelep a legtökéletlenebb. Erről szól ez a kis elmélkedés.
- A szabályozó a pillanatnyi hibajel szerint egy jól hangolt PID algoritmussal kiszámítja és kiadja a beavatkozási értéket a kimenetre. A motor erre válaszolna, ha tudna, mivel a tehetetlenségi nyomatéka (GD2) és súrlódása (szeleppel együtt) ebben akadályozza. Az akadályozás miatt a beavatkozás nem lesz azonos, sőt nem is lesz arányos a beavatozó jellel. Például legyen a kimenőjel 10° szögelfordulás és a szelep forduljon el 9°-ot az előbb említettek miatt. A szabályozó algoritmusa kiszámolja a visszacsatolt értékből, hogy a kiadott jel kevés. Az így szabálytalanul keletkezett hibajel egy hamis kimeneti értéket fog generálni.
A jelenség miatt egy járulékos hibajel keletkezik, amely a motoros szelep jelleggörbéjétől, kinematikai tulajdonságaitól, kopásaitól, szögelfordulásától és a szabályozott közeg tulajdonságaitól (viszkozitás, kavitáció, összenyomhatóság, stb) függ. A járulékos hibajelet nem lehet kompenzálni, mert véletlenszerű. A szabályozó úgy válaszol rá mint a külső zavarójelre. E miatt a szelep sohasem lehet egyensúlyban (elméletileg sem).
- A szabályozók algoritmusában a futási idő (átforgatás) konstansként szerepel. Tehát a szabályozó csak állandó futási idő esetén számol helyesen. A motoros szelep futási ideje viszont rendkívül durván változhat. Ezt a változást egy példával szemléltetjük. Legyen egy szelep átforgatási ideje 100 s, amelyet az előírás szerint stopperrel mértünk meg a szelep teljes átforgatásával. Megmértük a motor felfutási idejét, amely 1 s. Lineáris felfutást feltételezve ez 0,5 s forgatási időnek megfelelő szögelfordulást eredményez. A túlfutás kompenzálhatná a felfutást, de a súrlódás miatt ez is rövidebb az elméleti értéknél. A két hatás miatt a szögelfordulás mindig kevesebb lesz mint a beavatkozó jel. Tréfásan ez egy olyan hegy, amelynek csak emelkedő oldala van, bármerre megyünk mindig felfelé kell mászni.
A példa szerint minden forgatási impulzus kisebb forgatást eredményez a számítottnál, tehát a szabályozó szempontjából ez olyan mintha a futási idő változott volna meg. Ha ez az érték a 0,3 s, (amely nem egy kiugróan nagy szám) a késlekedés 30 impulzus esetén 9 s. Ez olyan mintha a futási idő 109 s-ra nőtt volna. Az algoritmusban az átforgatási idő "konstansa" 9%-kal nőtt, amely a konstansok családjában is bűnnek számít. Ezt a futási időnövekedést "nyugaton" slip-nek, csúszásnak nevezik. A jelenséget közönséges motoros szelepeknél csak konstrukcióval, később gondos karbantartással lehet tűrhető érték alatt tartani.
A slip integráló jellege miatt felgyülemlik és időnként a szabályozás felborulásához vezet, amelyből a szabályozó robusztusságának megfelelő válasszal jön ki. A robusztusság a hangolástól függ, tehát a rosszul hangolt rendszerekben ez furcsa, laikusok számára érthetetlen jelenséget okoz. - Közismert, hogy a nyugvó súrlódás (szakirodalomban stiction) nagyobb, mint a mozgó súrlódás (friction). A motoros szelep elhasználtsági állapotától függően nagyon súrlódik. Ez a súrlódásos indulás lökésszerű és késleltetett. Kívülről úgy néz ki, mintha a szelep leragadt volna. A leragadást a szakirodalom stick-nek nevezi. A szelep leragadása karbantartás elmaradása estén olyan mértékű lehet, hogy a szabályozó képtelen a folyamatot megfogni. Hazai viszonyok között "a szabályozó rossz" jelenség következik be, amely tartósan fennmarad a szelep megjavítása után is (lásd a kávéházi kabátlopás történetét).
- A stick-slip jelenség a hagyományos motoros szelep konstrukció fizikai tulajdonsága, amely az elhasználódás folyamán kedvezőtlenül változik. A visszavezetés nélküli motoros szelep szabályozása ezért nagyon összetett feladat. A legjobb minőségű, tökéletesen kiválasztott, előírás szerint installált szelep is begerjeszti a szabályozót. A jó szabályozó ezért nemcsak a szabályozási hurok adatai szerint avatkozik be, hanem válaszol a motoros szelep stick-slip okozta gerjedésére is. A szabályozó algoritmusának ezen részleteit természetesen nagy titokzatosság övezi.
Az algoritmus titokzatos részei természetesen nem tudják a jelenséget megszüntetni, hiszen ez azonos hatású a külső zavarójellel. A szabályozási hurok egyensúlyi állapotban is úgy viselkedik, mintha a vezetőjel állandóan változna. Tehát a jelenség visszavezethető a szabályozó robusztussági tulajdonságára. A robusztus szabályozó gyorsan, de lengésekkel áll be, a kevésbé robusztus lassan kevesebb lengéssel áll be.
Választani kell:
A. szűk tartományban szabályoz, a szelep sokat mozog, gyorsabban kopik
B. bővebb tartományban szabályoz a szelep nyugodtabb, sokáig üzemképes
Valamit valamiért, az optimumot kell a hangolással beállítani
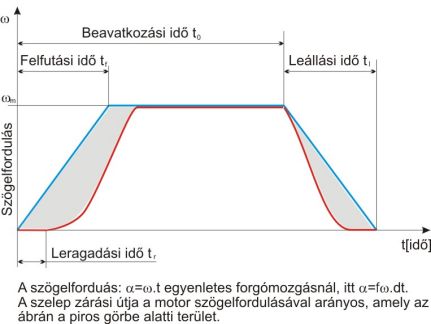
A jelenséget a 21. ábra mutatja be. A kék vonal az ideális, súrlódásmentes működést, a piros vonal a gyakorlati működést ábrázolja. Mivel a szelep útja a görbe alatti terület a szürkével jelölt terület a lemaradás mértéke. Könnyű belátni, hogy minden rendellenesség, állagromlás a szabályozás minőségét rontja.
A HAGA szabályozók motoros szelep szabályozó algoritmusa nem használja a szelep potenciométerét. A beavatkozójelet a hibajelből képezi. Tehát a beállított paraméterek alapján nem a helyzetet (potenciométert) hanem az áramlást szabályozza. A stick-slip jelenség miatt a szelep önmaga képez zavarójelet a szabályozó ezt nem veszi figyelembe.
A szelep szabályozásához a következő paramétereket kell beállítani:
PID, önhangolással
Futási idő mérés alapján
Beavatkozójel legkisebb értékének megadása, amelynél a szelep még nem mozdul
Holtzóna szélessége amelyen belül a szelep nem mozog
A szabályozás ellenőrzéséhez a szelepállást is ki kell jelezni. A kezelők a szelepállásból megállapíthatják a rendszerben keletkező hibákat. Például a motoros szelep előtti kézi állítású szelepet nem nyitották ki teljesen, a szelepállás nagyobb értéket mutat a szokásosnál. Ugyanígy lehet következtetni a szűrők eldugulására, a gáznyomás megváltozására, stb.
A 22. ábrán egy motoros szelep szabályozó látható.

Kapcsolódó anyagok: